
17751153703 吳小姐
17751153703 吳小姐
設備詳情


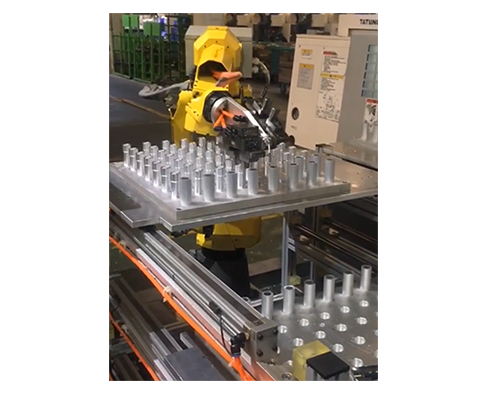
光學平臺上配置六軸機器人以及視覺定位系統(tǒng),平臺上放置著任意布置的被夾取物,保證被夾取物放置在機器人和視覺系統(tǒng)工作范圍內,以便視覺定位后機械手進行吸取;
進行手眼標定,得到攝像機圖像坐標與機械手基座之間的轉換關系;
通過視覺匹配算法,從圖像中定位出平臺上待夾取物位置;
基于手眼標定的結果,定位出被測物體相對于機械手基座的位置,并以固有的通信方式告知機械手被測物體位置信息;
控制機械手夾取固定的智能傳感器,在固定的掃描位置對被測物體進行掃描設備詳情

機械手鉸鏈組裝線
設備詳情

設備詳情
